InsectSAM & GroundingDINO
Combining InsectSAM with GroundingDINO for text-based mask generation.
This page can be found implemented as a two Jupyter Notebooks:
InsectSAM with GroundingDINO for Text-Based Mask Generation
We combine two advanced models - InsectSAM and Grounding DINO - to generate segmentation masks based on text prompts. Grounding DINO generates bounding boxes based on text prompts, and InsectSAM generates the corresponding segmentation masks. This implementation is based on the popular Grounded Segment Anything project, streamlined using the Transformers library.
-
Grounded Segment Anything repository on GitHub.
-
Refer to the paper for more details: Grounded Segment Anything.
-
Gradio demo using this method: InsectSAM on Hugging Face.
Set-up Environment
First, we need to install the required dependencies. The transformers library from Hugging Face provides the necessary models and tools.
!pip install --upgrade -q git+https://github.com/huggingface/transformers # Installs the latest version
Imports
We import all the necessary libraries and modules for this project. This includes image processing libraries (cv2, PIL), data handling libraries (torch, numpy), and visualization libraries (plotly, matplotlib).
import random
from dataclasses import dataclass
from typing import Any, List, Dict, Optional, Union, Tuple
import cv2
import torch
import requests
import numpy as np
from PIL import Image
import plotly.express as px
import matplotlib.pyplot as plt
import plotly.graph_objects as go
from transformers import AutoModelForMaskGeneration, AutoProcessor, pipeline
Result Utils
Bounding Box and Detection Result Classes
We define two dataclasses, BoundingBox and DetectionResult, to store the detection results. BoundingBox stores the coordinates of the bounding box, while DetectionResult stores the detection score, label, bounding box, and an optional mask.
@dataclass
class BoundingBox:
xmin: int
ymin: int
xmax: int
ymax: int
@property
def xyxy(self) -> List[float]:
return [self.xmin, self.ymin, self.xmax, self.ymax]
@dataclass
class DetectionResult:
score: float
label: str
box: BoundingBox
mask: Optional[np.array] = None
@classmethod
def from_dict(cls, detection_dict: Dict) -> 'DetectionResult':
return cls(score=detection_dict['score'],
label=detection_dict['label'],
box=BoundingBox(xmin=detection_dict['box']['xmin'],
ymin=detection_dict['box']['ymin'],
xmax=detection_dict['box']['xmax'],
ymax=detection_dict['box']['ymax']))
Plot Utils
Annotate Function
The annotate function takes an image and a list of detection results, then draws the bounding boxes and masks on the image. It converts the image to OpenCV format, iterates over the detections, and draws bounding boxes and masks using random colors.
def annotate(image: Union[Image.Image, np.ndarray], detection_results: List[DetectionResult]) -> np.ndarray:
image_cv2 = np.array(image) if isinstance(image, Image.Image) else image
image_cv2 = cv2.cvtColor(image_cv2, cv2.COLOR_RGB2BGR)
for detection in detection_results:
label = detection.label
score = detection.score
box = detection.box
mask = detection.mask
color = np.random.randint(0, 256, size=3)
cv2.rectangle(image_cv2, (box.xmin, box.ymin), (box.xmax, box.ymax), color.tolist(), 2)
cv2.putText(image_cv2, f'{label}: {score:.2f}', (box.xmin, box.ymin - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color.tolist(), 2)
if mask is not None:
mask_uint8 = (mask * 255).astype(np.uint8)
contours, _ = cv2.findContours(mask_uint8, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(image_cv2, contours, -1, color.tolist(), 2)
return cv2.cvtColor(image_cv2, cv2.COLOR_BGR2RGB)
Plot Detections Function
The plot_detections function visualizes the annotated image using Matplotlib. It calls the annotate function to draw the detections on the image and then displays the result.
def plot_detections(image: Union[Image.Image, np.ndarray], detections: List[DetectionResult], save_name: Optional[str] = None) -> None:
annotated_image = annotate(image, detections)
plt.imshow(annotated_image)
plt.axis('off')
if save_name:
plt.savefig(save_name, bbox_inches='tight')
plt.show()
Additional Utilities
CSS Color Utility
The random_named_css_colors function generates a list of randomly selected named CSS colors, useful for consistent and distinguishable annotation colors.
def random_named_css_colors(num_colors: int) -> List[str]:
named_css_colors = [
'aliceblue', 'antiquewhite', 'aqua', 'aquamarine', 'azure', 'beige', 'bisque', 'black', 'blanchedalmond',
'blue', 'blueviolet', 'brown', 'burlywood', 'cadetblue', 'chartreuse', 'chocolate', 'coral', 'cornflowerblue',
'cornsilk', 'crimson', 'cyan', 'darkblue', 'darkcyan', 'darkgoldenrod', 'darkgray', 'darkgreen', 'darkgrey',
'darkkhaki', 'darkmagenta', 'darkolivegreen', 'darkorange', 'darkorchid', 'darkred', 'darksalmon', 'darkseagreen',
'darkslateblue', 'darkslategray', 'darkslategrey', 'darkturquoise', 'darkviolet', 'deeppink', 'deepskyblue',
'dimgray', 'dimgrey', 'dodgerblue', 'firebrick', 'floralwhite', 'forestgreen', 'fuchsia', 'gainsboro', 'ghostwhite',
'gold', 'goldenrod', 'gray', 'green', 'greenyellow', 'grey', 'honeydew', 'hotpink', 'indianred', 'indigo', 'ivory',
'khaki', 'lavender', 'lavenderblush', 'lawngreen', 'lemonchiffon', 'lightblue', 'lightcoral', 'lightcyan', 'lightgoldenrodyellow',
'lightgray', 'lightgreen', 'lightgrey', 'lightpink', 'lightsalmon', 'lightseagreen', 'lightskyblue', 'lightslategray',
'lightslategrey', 'lightsteelblue', 'lightyellow', 'lime', 'limegreen', 'linen', 'magenta', 'maroon', 'mediumaquamarine',
'mediumblue', 'mediumorchid', 'mediumpurple', 'mediumseagreen', 'mediumslateblue', 'mediumspringgreen', 'mediumturquoise',
'mediumvioletred', 'midnightblue', 'mintcream', 'mistyrose', 'moccasin', 'navajowhite', 'navy', 'oldlace', 'olive',
'olivedrab', 'orange', 'orangered', 'orchid', 'palegoldenrod', 'palegreen', 'paleturquoise', 'palevioletred', 'papayawhip',
'peachpuff', 'peru', 'pink', 'plum', 'powderblue', 'purple', 'rebeccapurple', 'red', 'rosybrown', 'royalblue', 'saddlebrown',
'salmon', 'sandybrown', 'seagreen', 'seashell', 'sienna', 'silver', 'skyblue', 'slateblue', 'slategray', 'slategrey',
'snow', 'springgreen', 'steelblue', 'tan', 'teal', 'thistle', 'tomato', 'turquoise', 'violet', 'wheat', 'white',
'whitesmoke', 'yellow', 'yellowgreen'
]
return random.sample(named_css_colors, min(num_colors, len(named_css_colors)))
Plotly Visualization
The plot_detections_plotly function provides an alternative visualization using Plotly, allowing for interactive exploration of the detection results.
def plot_detections_plotly(image: np.ndarray, detections: List[DetectionResult], class_colors: Optional[Dict[str, str]] = None) -> None:
if class_colors is None:
num_detections = len(detections)
colors = random_named_css_colors(num_detections)
class_colors = {}
for i in range(num_detections):
class_colors[i] = colors[i]
fig = px.imshow(image)
for idx, detection in enumerate(detections):
label = detection.label
box = detection.box
score = detection.score
mask = detection.mask
polygon = mask_to_polygon(mask)
fig.add_trace(go.Scatter(
x=[point[0] for point in polygon] + [polygon[0][0]],
y=[point[1] for point in polygon] + [polygon[0][1]],
mode='lines',
line=dict(color=class_colors[idx],
width=2),
fill='toself',
name=f"{label}: {score:.2f}"
))
xmin, ymin, xmax, ymax = box.xyxy
shape = [
dict(
type="rect",
xref="x", yref="y",
x0=xmin, y0=ymin,
x1=xmax, y1=ymax,
line=dict(color=class_colors[idx])
)
]
annotation = [
dict(
x=(xmin+xmax) // 2, y=(ymin+ymax) // 2,
xref="x", yref="y",
text=f"{label}: {score:.2f}",
)
]
shapes.append(shape)
annotations.append(annotation)
button_shapes = [dict(label="None", method="relayout", args=["shapes", []])]
button_shapes = button_shapes + [
dict(label=f"Detection {idx+1}", method="relayout", args=["shapes", shape]) for idx, shape in enumerate(shapes)
]
button_shapes = button_shapes + [dict(label="All", method="relayout", args=["shapes", sum(shapes, [])])]
fig.update_layout(
xaxis=dict(visible=False),
yaxis=dict(visible=False),
showlegend=True,
updatemenus=[
dict(
type="buttons",
direction="up",
buttons=button_shapes
)
],
legend=dict(
orientation="h",
yanchor="bottom",
y=1.02,
xanchor="right",
x=1
)
)
fig.show()
Utility Functions
These utility functions handle image loading, mask refinement, and conversion between polygons and masks.
def mask_to_polygon(mask: np.ndarray) -> List[List[int]]:
contours, _ = cv2.findContours(mask.astype(np.uint8), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
largest_contour = max(contours, key=cv2.contourArea)
polygon = largest_contour.reshape(-1, 2).tolist()
return polygon
def polygon_to_mask(polygon: List[Tuple[int, int]], image_shape: Tuple[int, int]) -> np.ndarray:
mask = np.zeros(image_shape, dtype=np.uint8)
pts = np.array(polygon, dtype=np.int32)
cv2.fillPoly(mask, [pts], color=(255,))
return mask
def load_image(image_str: str) -> Image.Image:
if image_str.startswith("http"):
image = Image.open(requests.get(image_str, stream=True).raw).convert("RGB")
else:
image = Image.open(image_str).convert("RGB")
return image
def get_boxes(results: DetectionResult) -> List[List[List[float]]]:
boxes = []
for result in results:
xyxy = result.box.xyxy
boxes.append(xyxy)
return [boxes]
def refine_masks(masks: torch.BoolTensor, polygon_refinement: bool = False) -> List[np.ndarray]:
masks = masks.cpu().float()
masks = masks.permute(0, 2, 3, 1)
masks = masks.mean(axis=-1)
masks = (masks > 0).int()
masks = masks.numpy().astype(np.uint8)
masks = list(masks)
if polygon_refinement:
for idx, mask in enumerate(masks):
shape = mask.shape
polygon = mask_to_polygon(mask)
mask = polygon_to_mask(polygon, shape)
masks[idx] = mask
return masks
Grounded Segment Anything
Detect Function
The detect function uses Grounding DINO to detect objects in the image based on text prompts. It outputs a list of detection results, each containing the detected object's bounding box, label, and score.
def detect(image: Image.Image, labels: List[str], threshold: float = 0.3, detector_id: Optional[str] = None) -> List[Dict[str, Any]]:
device = "cuda" if torch.cuda.is_available() else "cpu"
detector_id = detector_id if detector_id is not None else "IDEA-Research/grounding-dino-base"
object_detector = pipeline(model=detector_id, task="zero-shot-object-detection", device=device)
labels = [label if label.endswith(".") else label+"." for label in labels]
results = object_detector(image, candidate_labels=labels, threshold=threshold)
results = [DetectionResult.from_dict(result) for result in results]
return results
Segment Function
The segment function uses InsectSAM to generate segmentation masks for the detected bounding boxes. It refines the masks if necessary and updates the detection results with the generated masks.
def segment(image: Image.Image, detection_results: List[Dict[str, Any]], polygon_refinement: bool = False, segmenter_id: Optional[str] = None) -> List[DetectionResult]:
device = "cuda" if torch.cuda.is_available() else "cpu"
segmenter_id = segmenter_id if segmenter_id is not None else "martintmv/InsectSAM"
segmentator = AutoModelForMaskGeneration.from_pretrained(segmenter_id).to(device)
processor = AutoProcessor.from_pretrained(segmenter_id)
boxes = get_boxes(detection_results)
inputs = processor(images=image, input_boxes=boxes, return_tensors="pt").to(device)
outputs = segmentator(**inputs)
masks = processor.post_process_masks(
masks=outputs.pred_masks,
original_sizes=inputs.original_sizes,
reshaped_input_sizes=inputs.reshaped_input_sizes
)[0]
masks = refine_masks(masks, polygon_refinement)
for detection_result, mask in zip(detection_results, masks):
detection_result.mask = mask
return detection_results
Grounded Segmentation Function
The grounded_segmentation function combines the detect and segment functions to perform end-to-end object detection and segmentation in a single call. It returns the annotated image and detection results.
def grounded_segmentation(image: Union[Image.Image, str], labels: List[str], threshold: float = 0.3, polygon_refinement: bool = False, detector_id: Optional[str] = None, segmenter_id: Optional[str] = None) -> Tuple[np.ndarray, List[DetectionResult]]:
if isinstance(image, str):
image = load_image(image)
detections = detect(image, labels, threshold, detector_id)
detections = segment(image, detections, polygon_refinement, segmenter_id)
return np.array(image), detections
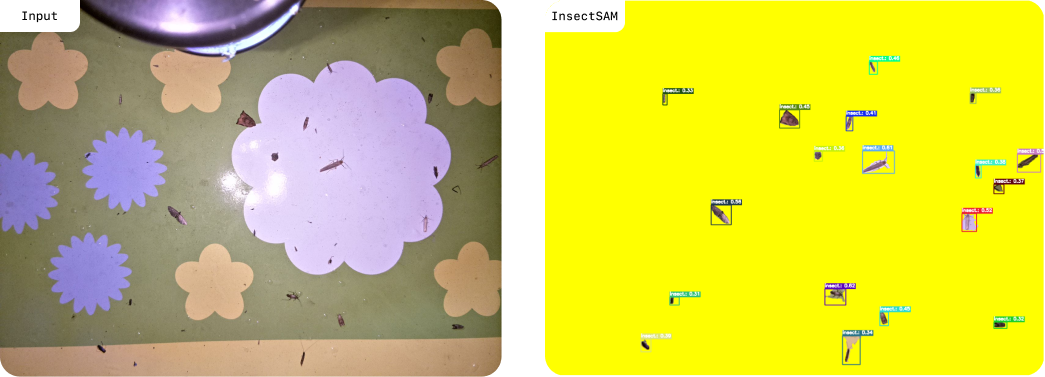
Inference
Perform grounded segmentation using an example image and text labels (image_url and labels). This section demonstrates how to use the grounded_segmentation function with a sample image and labels.
image_url = "IMAGE URL/PATH HERE"
labels = ["insect"]
threshold = 0.3
detector_id = "IDEA-Research/grounding-dino-base"
segmenter_id = "martintmv/InsectSAM"
image_array, detections = grounded_segmentation(
image=image_url,
labels=labels,
threshold=threshold,
polygon_refinement=True,
detector_id=detector_id,
segmenter_id=segmenter_id
)
plt.figure(figsize=(25, 10))
plot_detections(image_array, detections, "IMAGE URL/PATH HERE")
Extract Insect Masks and Apply on Yellow Background
Extract masks of detected insects and apply them onto a yellow background to prepare them for DIOPSIS and ARISE.
Extract Insect Masks
The extract_insect_masks function extracts the masks of detected insects from the detection results.
def extract_insect_masks(image: np.ndarray, detections: List[DetectionResult]) -> List[np.ndarray]:
insect_masks = []
for detection in detections:
mask = detection.mask
if mask is not None:
insect_masks.append(mask)
return insect_masks
Apply Masks on Yellow Background
The put_masks_on_yellow_background function applies the extracted insect masks onto a yellow background.
def put_masks_on_yellow_background(image_shape: Tuple[int, int], masks: List[np.ndarray]) -> np.ndarray:
yellow_background = np.full((image_shape[0], image_shape[1], 3), (0, 255, 255), dtype=np.uint8)
for mask in masks:
mask_rgb = cv2.cvtColor(mask, cv2.COLOR_GRAY2RGB)
for c in range(3):
yellow_background[:,:,c] = cv2.bitwise_or(yellow_background[:,:,c], mask_rgb[:,:,c])
return yellow_background
insect_masks = extract_insect_masks(image_array, detections)
yellow_background = np.full_like(image_array, (0, 255, 255), dtype=np.uint8)
yellow_background = put_masks_on_yellow_background(image_array.shape, insect_masks)
plt.figure(figsize=(10, 10))
plt.imshow(yellow_background)
plt.axis('off')
plt.show()
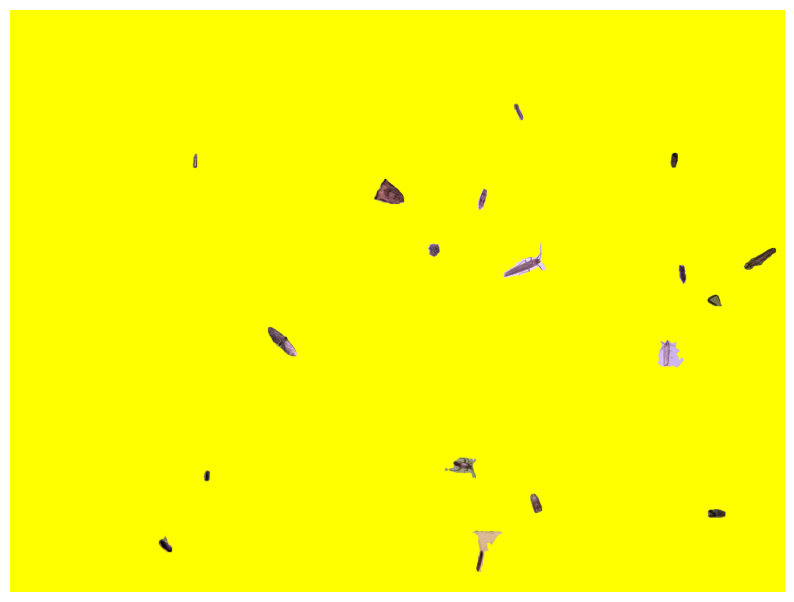
Paste Insects on Yellow Background
Extract the insect from the original image using the mask and paste it on a yellow background.
Extract and Paste Insect
The extract_and_paste_insect function extracts the insect from the original image using the mask and pastes it on the provided background.
def mask_to_min_max(mask):
y, x = np.where(mask)
xmin, xmax = x.min(), x.max()
ymin, ymax = y.min(), y.max()
return xmin, ymin
, xmax, ymax
def extract_and_paste_insect(original_image, detection, background):
mask = detection.mask
xmin, ymin, xmax, ymax = mask_to_min_max(mask)
insect_crop = original_image[ymin:ymax, xmin:xmax]
mask_crop = mask[ymin:ymax, xmin:xmax]
insect = cv2.bitwise_and(insect_crop, insect_crop, mask=mask_crop)
x_offset, y_offset = detection.box.xmin, detection.box.ymin
x_end, y_end = x_offset + insect.shape[1], y_offset + insect.shape[0]
inverse_mask = cv2.bitwise_not(mask_crop)
bg_region = background[y_offset:y_end, x_offset:x_end]
bg_ready = cv2.bitwise_and(bg_region, bg_region, mask=inverse_mask)
combined = cv2.add(insect, bg_ready)
background[y_offset:y_end, x_offset:x_end] = combined
Create Yellow Background with Insects
The create_yellow_background_with_insects function creates a yellow background and pastes all detected insects on it.
def create_yellow_background_with_insects(image, detections):
yellow_background = np.full_like(image, (0, 255, 255), dtype=np.uint8)
for detection in detections:
if detection.mask is not None:
extract_and_paste_insect(image, detection, yellow_background)
return yellow_background
image_array_cv2 = cv2.cvtColor(np.array(image_array), cv2.COLOR_RGB2BGR)
yellow_background_with_insects = create_yellow_background_with_insects(image_array_cv2, detections)
plt.figure(figsize=(10, 10))
plt.imshow(cv2.cvtColor(yellow_background_with_insects, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
The output should look something like:
Draw Classification Boxes on Yellow Background (Optional)
Draw classification bounding boxes and labels on the image with insects on the yellow background.
Draw Classification Boxes
The draw_classification_boxes function draws the classification bounding boxes and labels on the image with insects.
def draw_classification_boxes(image_with_insects, detections):
for detection in detections:
label = detection.label
score = detection.score
box = detection.box
color = np.random.randint(0, 256, size=3).tolist()
cv2.rectangle(image_with_insects, (box.xmin, box.ymin), (box.xmax, box.ymax), color, 2)
(text_width, text_height), baseline = cv2.getTextSize(f"{label}: {score:.2f}", cv2.FONT_HERSHEY_SIMPLEX, 0.5, 2)
cv2.rectangle(
image_with_insects,
(box.xmin, box.ymin - text_height - baseline),
(box.xmin + text_width, box.ymin),
color,
thickness=cv2.FILLED
)
cv2.putText(
image_with_insects,
f"{label}: {score:.2f}",
(box.xmin, box.ymin - baseline),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(255, 255, 255),
2
)
return image_with_insects
yellow_background_with_boxes = yellow_background_with_insects.copy()
yellow_background_with_boxes = draw_classification_boxes(yellow_background_with_boxes, detections)
plt.figure(figsize=(25, 10))
plt.imshow(cv2.cvtColor(yellow_background_with_boxes, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
The output with the bounding boxes included look something like:
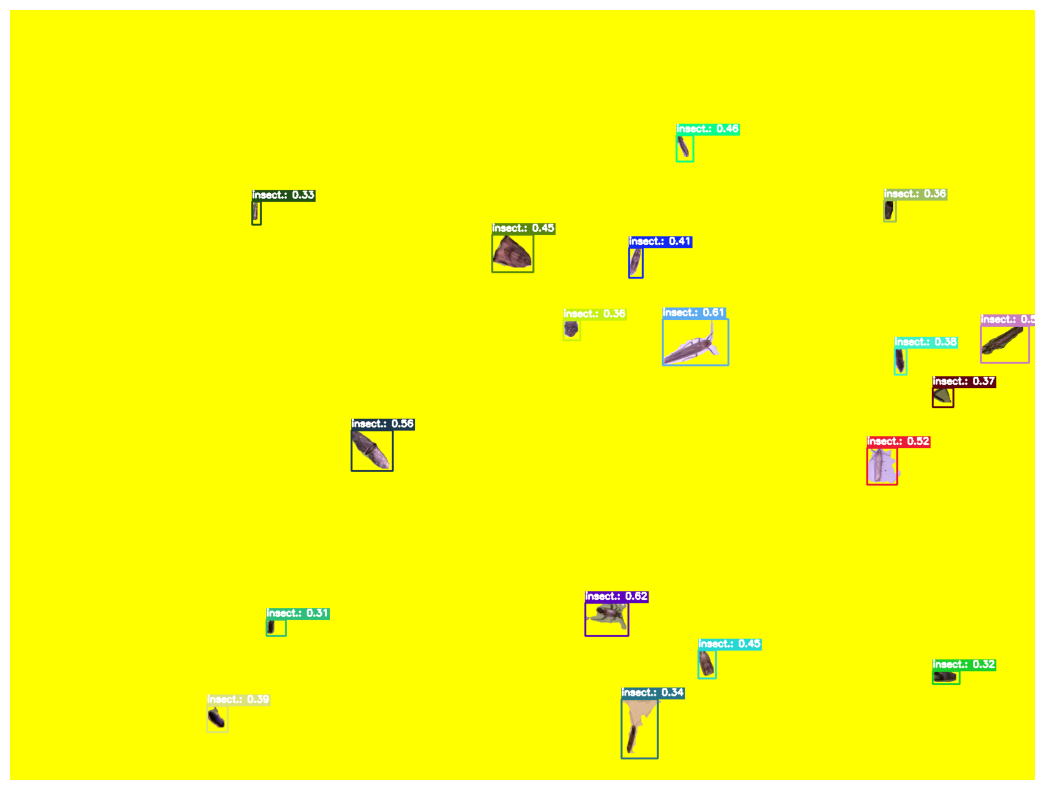
As much as these classification bounding boxes are not useful to get insights for what species the insects are, they are useful for the DIOPSIS and ARISE algorithms to generate and crop each insect from the original unproccessed image to small images for further processing, while changing the complex background to yellow. In Hugging Face InsectSAM Gradio, this is visible when Include Bounding Boxes is checked.